"Cat" and "Dog" datasets are aimed to evaluate the accuracy of multi-view 3D reconstruction algorithms, and are freely available in this webpage.
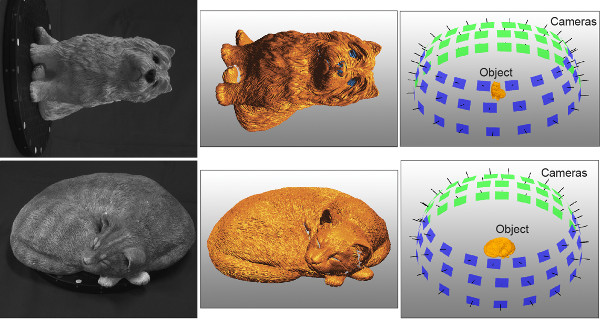
Dataset description (Grayscale)
The datasets consist of a set of multi-view images and the ground-truth mesh model. The target objects are figurines of a cat and a dog. The images are taken with a grayscale camera (Point Gray, Flea 3: FL3-U3-13Y3MC) by changing the height of the camera with 3 patterns and the rotation angle of the turntable with 20 patterns. The size of the image is 1,280x1,024 pixels. A 3D mesh model for each target object is measured with the 3D digitizing system (Steinbichler, COMET5).
Download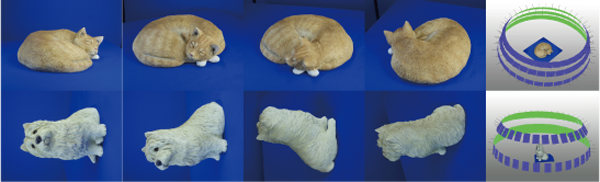
The datasets consist of a set of multi-view images and the ground-truth mesh model. The target objects are figurines of a cat and a dog. The images are captured by an RGB-color camera (Panasonic Lumix GF6) with 2,272x1,704 pixels. The images are taken with the camera by changing the height of the camera with 3 patterns for Cat and 2 patterns for Dog and the rotation angle of the turntable with 36 patterns. Hence, Cat and Dog datasets consist of 108 and 72 images, respectively. A 3D mesh model for each target object is measured with the 3D digitizing system (Steinbichler, COMET5), which is the same in the case of grayscale datasets.
DownloadS. Sakai, K. Ito, T. Aoki, T. Watanabe, and H. Unten "Phase-based window matching with geometric correction for multi-view stereo," IEICE Transactions on Information and Systems, Vol. E98-D, No. 10, pp. 1818--1828, October 2015.